|
 |
 |
| The linear
actuator can be controlled using CAN Bus and an Arduino
processor board. This approach is described here. |
||
 Thomson HD Electric Linear Actuator |
||
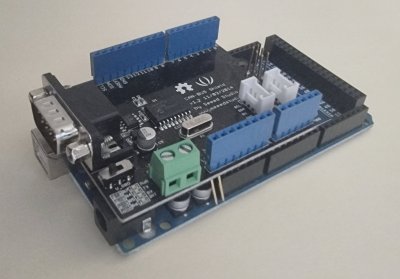
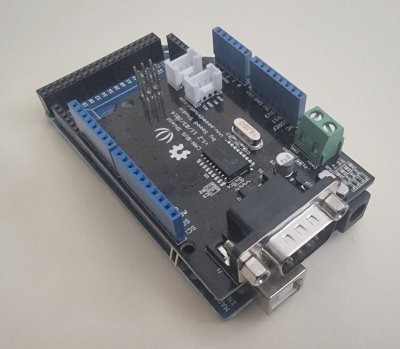
Arduino Mega 256 and Seeed Studios CAN Bus board. |
||
For this case we used an Arduino Mega 2560 R2 processor board. This has had a CAN Bus shield added to it. The shield used was from Seeed Studio (https://www.seeedstudio.com). Specifically the shield used here was Version 1.2 (11/03/2014) https://www.seeedstudio.com/CAN-BUS-Shield-V2.html |
||
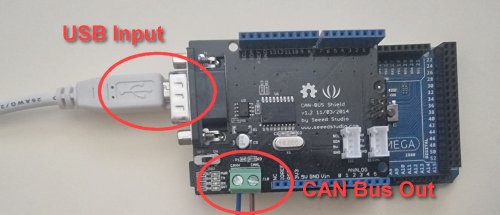 Arduino and CAN Bus board connections |
||
|
|
||
|
To program
the micro-processor you will need to obtain some library files
to handle s
= Initiate network scan |
||
|
|
||
Thomson HD Linear Actuator 12 volt 20 amp Power Supply |